# Chapter 5
## Left handed vs. Right Handed Coordinate Systems
* To switch between the two, switch the direction of one of the axes
* More common in 3d graphics to use left handed coordinate system
(z axis points away; larger Z = further away)
## Vector magnitude
* magnitude = length = |**v**| =
= &sqrt;(**v** * **v**) = &sqrt;(vx\*vx + vy\*vy + vz\*vz)
## Normalizing a vector
* normal vector **u** = **v**/|**v**|
## Vector projection
* **u** = unit vector (|**u**| = 1)
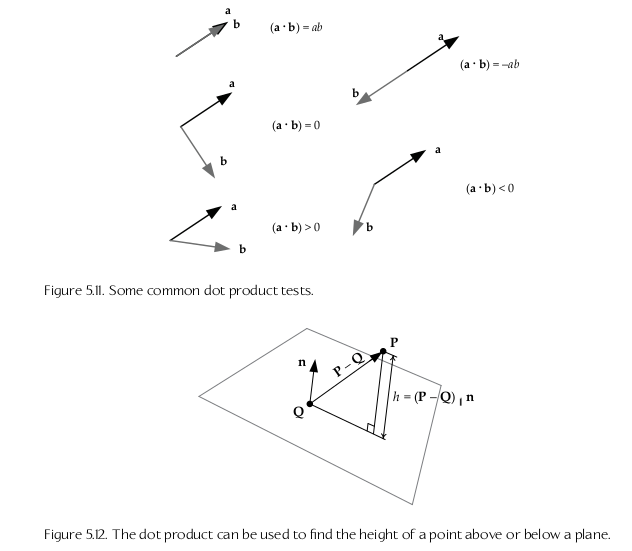
* dot product **a** * **u** = the length of the projection
of **a** onto direction **u**
## Dot Product Applications
## Cross product
* **a** x **b** = \[(aybz - azby), (azbx - axbz), (axby - aybx)\]
## Cross product to find the normal vector of a plane
* Given points **P**1, **P**2, **P**3
* normal vector **n** = normalize((**P**2 - **P**1)x(**P**3 - **P**1))
## Linear Interpolation (LERP)
* Finds an intermediate point between 2 other points
* LERP(**A**,**B**,Β) = (1-Β)**A** + Β**B**
* = \[(1-Β)Ax + Βx, (1-Β)Ay + Βy, (1-Β)Az + Βz\]
## Row vs Column Vectors
* Row vectors: multiply with matrices left-to-right
* **v**' = **v****A** * **B** * **C**
* Col vectors: multiply with matrices right-to-left
* **v**' = **C** * **B** * **A****v**
## Affine transformations and matrix inverse
* All affine transformation matrices have inverses:
**A** * **A**-1 = **I**
* Rotate, translate, scale, and shear
* (**A****B****C**)-1 = **C**-1**B**-1**A**-1
## Matrix transpose
* **M**T = values reflected across the diagonal
* **M**i,j = **M**j,i
* (**A****B****C**)T = **C**T**B**T**A**T
## Homogeneous coordinates
* Point has w component = 1
* Direction has w component = 0
* Homoegeneous transformation matrices have w component = 1
since they deal with transforming points
## Yaw, pitch, roll
* Pitch: rotation around left/right/x axis
* Yaw: rotation around up/y axis
* Roll: rotation around front/z axis
## Coordinate Spaces
* Model space: origin is at the center of the object/model
* World space: all objects/models are relative to this center
* View space/camera space: origin is center of the camera
## Change of Basis (converting between coordinate spaces)
* Pp = result parent space vector
* Pc = initial child space vector to convert
* i,j,k,t are the unit basis vectors for the child space
* t is the translation of the child coordinate system
relative to the parent space
* Mc->p = change of basis matrix
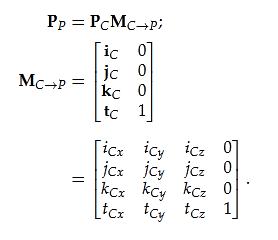
* Given any affine 4x4 transform matrix, you can
extract the child space basis vectors be isolating
the appropriate row (if in the row format as shown above)
or column
## transforming normal vectors
* Normals are transformed from space A to B by the
transpose of the inverse of the matrix shown
above (given change of basis matrix Ma->b, the
normal transformation matrix is
(Ma->b-1)T)
## Quaternions
* Alternative and simpler way to represent rotations
* Looks like a 4d vector but behaves differently
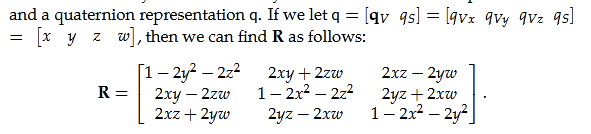
* q = [qx qy qz qw]
* alternative representations:
* q = \[qv qs\] (qv is the vector part, qs is a scalar)
* Unit length quaternions represent 3d rotations
* qx\*qx + qy\*qy + qz\*qz + qw\*qw = 1
## Quaternion multiplication (grassman product)
* pq = [(ps\*qv + qs\*pv + cross(pv,qv)) (ps\*qs - dot(pv,qv))]
* the left part results in a vector
* the right part results in a scalar
## Quaternion inverse/conjugate
* conjugate = q\* = [-qv qs]
* inverse = q-1 = q\*/|q|2
* In our case, using unit length quaternions,
|q|2 = 1, so inverse = conjugate
* (pq)\* = q\*p\*
* (pq)-1 = q-1p-1
## Rotating a vector with a quaternion
* Convert vector v into quaternion form
* for a 3d vec, add a fourth w component = 0
* v quaternion = [vx vy vz 0]
* multiply by the quaternion
* multiply by its inverse
* result quaternion v' = qvquatq-1
* extract the first 3 components of v' back into vector
form
* Multiplcations can be concatenated/combined into a single
quaternion like matrix multiplications
* e.g. Rnet = R3\*R2\*R1
* v' = q3q2q1vquatq1-1q2-1q3-1
## Quaternions to Rotation matrix
* Can be converted to and from 3d rotation matrix rep:
## Rotational Linear Interpolation
* Can find a quaternion point between two other quaternions via LERP:
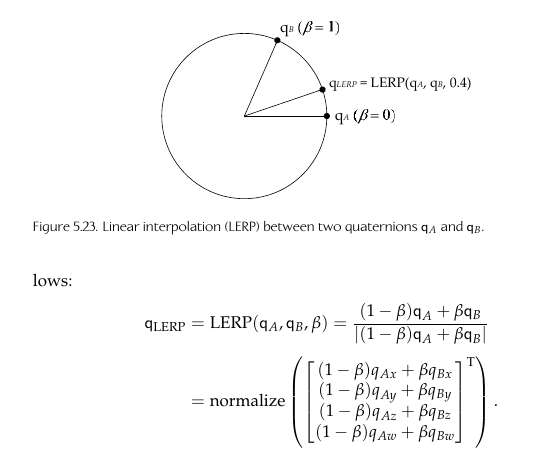
* Results in the weighted average between qA and qB (Β percent
between qA and qB)
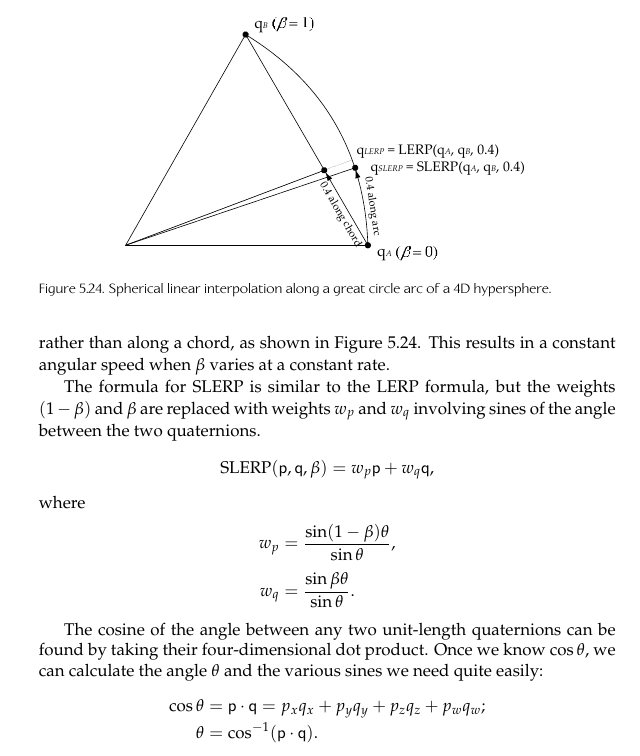
## Spherical Linear Interpolation
* Spherical Linear Interpolation: SLERP
* On PS3 SPUs, Naughty Dog's Ice Team's SLERP implementation
takes 20 cycles per join, while LERP takes 16.25 cycles per
joint.
* SLERP as opposed to LERP can result in better looking animations
* However LERP is usually good enough for most purposes
## Euler Angles
* \[θy θp θr\] = yaw, pitch, roll
* Cannot be easily interpolated
* Gimbal lock: 90 degree rotation causes 1 of the axis to collapse
onto one of the other axis
* Order in which the axis are rotated matters, e.g. Pitch,Yaw,then Roll
will result differently than Yaw,Pitch,then Roll
* 3x3 rotation matrices are not intuitive in terms of understanding
the transformation, and cannot be easily interpolated.
* 3x3 rotation matrices take up 9 float numbers as opposed to
3 float numbers for euler angles
## Axis+Angle representation
* A unit vector representing axis (x,y,z) then the angle =
\[ax ay az θ\]
* Cannot be easily interpolated
## SRT Transformation
* Combines quaternions (rotation representation) with
a translation vector and scale factor, resulting
in an alternative to 4x4 affine transformation matrices
* SRT = scale, rotation, translation
* Alternatively, SQT = scale, quaternion, translation
* SRT = [s q **t**], where s is either a single scale value
or a nonuniform scale vector **s**
* either 8 floats (uniform scalar) or 10 floats (nonuniform),
as opposed to 12 floats for a 4x3 matrix
* easily interpolated
## Pseudo-Random number generation
* Linear Congruential Generator
* Sometimes used in C-library rand() function
* Not very high quality
* Mersenne Twister
* Very large period before repeats: 219937-1
* High distribution
* Passes statistical randomness tests
* Fast
* http://www.math.sci.hiroshima-u.ac.jp/~m-mat/MT/SFMT/index.htm
* Mother of All Pseudo-Random, Xorshift, KISS99
* Simpler than Mersenne, period of 2250
* Xorshift: faster than Mother-of
* KISS: series collectively known as keep it simple stupid
* http://en.wikipedia.org/wiki/George_Marsaglia
* ftp://ftp.forth.org/pub/C/mother.c
* http://www.agner.org/random
* http://www.jstatsoft.org/v08/i14/paper
* PCG
* Combines congruential (CG) with permutation functions (P)
* http://www.pcg-random.org